无人机的基本构成包括主控、电源、电机驱动、电机、各种传感器如三轴加速度计、陀螺仪、气压计、磁力计等。其中无人机搭载的摄像头已经成为目前最重要的购买考虑因素,摄像头+云台已经和无人机形成了天生的绝配,多少人买无人机是为了去看看更高更远的地方,去看看那些不曾踏足过的地方。
本篇介绍4种从入门级到高端的各种无人机解决方案。
一、新唐M452飞控套件
新唐M452飞控套件并不是一个完整的无人机方案,仅仅提供了部分核心的组件,而像电机、机架、电调等需要自己另外去配,这样做虽然增加了用户的DIY成本,但无疑可以自主选择DIY理想的飞行器模型。

飞控板的主控是采用了新唐NuMicro M452 USB系列M452LG6AE微控制器,基于ARM Cortex-M4处理器,内建DSP以及浮点运算单元,能更好的负责飞行主控功能。同时,飞控板上搭载了用于判断方向的电子罗盘、用于定高的气压计以及稳定的MPU-6050 6轴加速度计/陀螺仪。

M452飞控板上各个传感器的作用如下:
加速度传感器的主要作用是利用重力效应给四轴飞行器提供一个水平基准
陀螺仪是用来测量角速度的,其反映的是自身角度的变化
电子罗盘的主要作用是利用地球南北极磁力给四轴飞行器提供一个方向基准
动手实际DIY了基于新唐推M452飞控套件的飞行器,飞行器主要包括M452飞控板+N79E814遥控板+南方硅谷2.4G SSV7241无线收发器模块,配合新唐提供的资料、代码以及软件工具等,用户可以通过Nu-LINK Me方便的实现对板卡的开发、调试。
小结,M452飞控套件确实是一个非常不错的无人机DIY开发套件。
二、英飞凌无人机套件
英飞凌的这款四轴飞行器方案主打的就是完整的系统解决方案,一款可靠的、低功耗的四轴飞行器,不但可以让你的飞行续航更持久,更可以节省你30%的项目开发周期,主控为自家高端的XMC4500系列微控制器。

套件包含四轴飞行器中主要的飞控以及电调模块,所以组成一个简单的、完整的四轴飞行器只需加上电机、锂电池即可,非常方便。何况,英飞凌本身在说明文档中推荐了相应的电机、锂电池规格,更加方便用户自己DIY。

飞控板做工扎实,毕竟实际调试的时候免不了要时不时的“坠机”,而且英飞凌的飞控板尺寸不算小,这对PCB的强度以及板载的器件都是一个不小的挑战,除了XMC4500主控制器,飞控板板载器件以及功能接口还包含了:
基于英飞凌XMC4200系类微控制器的调试电路,带MicroUSB接口
一个MicroUSB接口,GPS信号接口、锂电池电压监测接口、无线控制信号接口、BCR321U E6327 LED驱动
RN42蓝牙模块,用于与手机APP实现连接控制
气压计 DPS310,用于计算四轴飞行器的定高
9轴传感器 MPU9250,包含了加速度、磁力计、陀螺仪功能
其中飞控板的电源支持7.4~12.6V供电,电源方面通过英飞凌自家高效率的IFX91041V50 5V DCDC转换芯片,将输入电压转化为5V直流输出,再通过IFX1117MEV33 LDO输出3.3V电压提供给微控制器、传感器供电。
电调板
英飞凌的电机驱动板包括了电机控制器XMC1302-Q040X0128,半桥驱动电路IR2301S、MOS管BSC0925ND组成的半桥电路,如下图所示。

电机控制IC采用的是英飞凌家族XMC1000系列中的XMC1302微控制器,基于ARM Cortex-M0内核,主要用于实时控制如电机驱动等。
XMC1302微控制器特性:
基于32位ARM Cortex-M0处理器,8KB on-chip ROM、16KB SRAM、200KB Flash
两个通用串行接口通道(USIC):可用作UART、SPI、I2C、I2S、LIN接口
AD转换、3个模拟比较器、温度传感器
工业控制外设:CCU4、CCU8、POSIF、BCCU
系统控制单元:WDT、RTC、SCU(用于系统配置和控制)
同XMC4500一样,作为面向电机控制领域系列产品,XMC1302内部也包含许多特殊的单元,CCU4、CCU8、POSIF,为工程师提供了便利的开发环境。 英飞凌XMC1302微控制器+英飞凌半桥驱动IC IR2301s+英飞凌 BSC0925ND MOS管组成的半桥电路输出驱动三相电机的U、V、W信号,是整个四轴飞行器电调的核心。
小结,值得一提的是,注意到飞控板+电调板上的元器件,除了个别传感器外,其他核心器件无一不是英飞凌自家的器件,这才是真正自家完整的系统解决方案。
三、Sihid COFDM(编码正交频分复用)高清图传方案
COFDM无线图像传输是目前具有非常大发展潜力的调制技术,其基本原理就是将高速数据流通过串并转换,分配到传输速率较低的若干子信道中进行传输,即将频域中的一个宽带信道划分成多个重叠的子信道信号进行窄带传输。COFDM图传可以有效的解决两个问题,一个是移动中传输图像出现的多径干扰,另一个则是宽带传输,可以实现高质量的图像画面。
下面是一款COFDM高清数字无线图传开发套件,适合应用于目前对高清无线图传有要求的一些移动设备图传领域,比如无人机。

Sihid COFDM高清数字无线图传开发套包括了一个Sihid COFDM 2.4GHz 双天线发射机、一个FC2400A 2.4GHz 接收模块。
Sihid COFDM 2.4GHz 双天线发射机拆解出来后是一个SEM9363高清编码调制板以及D-PA2400A功率放大板。
SEM9363高清编码调制板
要实现图传,需要采集视频数据,Sihid SEM9363无线数字图传编码调制板通过MicroHDMI接口输入高清数字视频(HDMI接收器IT6801),然后通过板载的海思Hi3516A处理器做视频压缩编码,压缩后的视频信号再通过FPGA实现COFDM信道调制,从整个方案来说,这是图传方案的核心所在,调制后的视频信号再经过AD9363射频收发器转换为模拟信号调制发射出去。

另外,SEM9363高清编码调制板同时将Hi3516A处理器的调试串口、FPGA的JTAG调试口、OSD接口、控制串口、电源等信号集中到D-PA2400A功率放大板的对外接口上。
D-PA2400A功率放大板
D-PA2400A功率放大板包含两路独立的射频功率放大模块,看起来比较像是Avago的MGA-22003 功率放大器,这两个功率放大模块将SEM9363A输出的射频信号进行功率放大输出,如下图所示。

其实D-PA2400A功率放大板将SEM9363调制板上的Hi3516A调试串口、FPGA JTAG调试口、OSD接口、控制串口、电源等信号都集中扩展出来了,两款板卡是通过带pin扩展座的FPC连接器连接,与此同时,SEM9363板的两个RF输出分别通过IPEX连接线接到D-PA2400A板的两个RF输入接口,D-PA2400A板上的每路功率放大模块工作参数如下:
工作频率:2.400GHz ~ 2.483GHz
增益:34±1dB
功率输出1dB: 31dBm
FC2400A 2.4GHz接收模块
FC2400A接收模块下变频板将接收到的2.4GHz射频信号转换为250MHz信号,再通过信道解调模块进行COFDM解调转换为数字信号,最后通过USB接口将解调后的数字视频信号传给手机(或PC)做H.264解压播放。FC2400A 2.4GHz接收模块包括LINEAR 下变频混频器LTC5542、STM32F03微控制器。


其中,FC2400A板的RF输出通过射频线连接到COFDM Demodulator模块的RF输入。另外,相信不少工程师对R820T+RTL2832U的硬件组合也是非常熟悉的,这是先前非常流行的电视棒的方案。
FC2400A下变频板的参数如下:
工作频率:2.400GHz ~ 2.483GHz
射频接口:SMA天线接口
接收灵敏度:8MHz时-96±1dbm,6MHz时-97±1dbm
8位参数设置开关(接收与解调参数设置)
Micro USB接口(USB slave),将解调后的视频接入笔记本\平板\手机等设备进行H.264解码播放。
供电电压:5V
小结,实际试用下来,Sihid COFDM高清数字无线图传开发套件的图传质量效果还是非常不错的。另外,除了此次的开发套件,矽海达还可根据客户应用需要定制不同规格的数字高清无线图传产品,比如,通过设计不同规格的PA模块可支持其它工作频段和射频功率;可更改现有设计增加其它视频输入输出处理接口,如发射端AV输入、USB输入、SDI输入,接收端HDMI输出、SDI输出等;IP协议方式低延时远距离宽带数据传输等。
四、大疆晓Spark
大疆晓Spark可以说是DJI推出的一个手势控制飞行器方案,配置上采用联芯LC1860C主控+联芯LC1160 PMU。LC1860C则是当年的红米2A上的主应用处理器,4个ARM Cortex-A7处理器,主频1.5GHz,另外集成2核MaliT628 GPU,具备1300万像素摄像处理能力及1080P@30fps编解码能力,所以从这里我们也基本能发现Spark录制视频的极限,1080P@30fps,LC1160则是配套的电源管理方案。

LC1860C下边则是美光的闪存+运存颗粒,查FBGA Code可知为具体型号为MT29TZZZ4D4BKERL-125 W.94M,集成了4GB eMMC以及512MB LPDDR3。

LC1160电源管理芯片下边则是USB2.0 HUB芯片GL850H,再下边则是晓Spark上的重头戏芯片Movidius MA2155,全称视觉处理器Vision Processing Units(VPUs),这是专门为计算机视觉进行优化,可以用于 3D 扫描建模、室内导航、360°全景视频等更前沿的计算机视觉用途,从而实现像晓Spark上那些功能,如3D图形感知,手势识别,智能跟随等,所以这颗VPU也是无人机的视觉定位系统的核心单元。同时这也是目前边缘计算中比较出彩的一颗AI芯片,之前英特尔也推出了基于此款芯片的神经计算棒1代,当然目前的话有性能更强大的Intel Myriad X,如果对这感兴趣可以看看神经计算棒2代的评测。

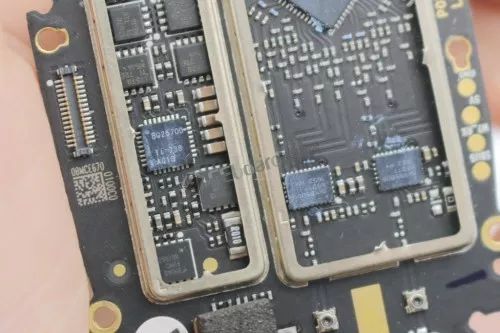
晓Spark的飞控也不简单,采用了Microchip的ATSAME70Q21芯片,基于ARM Cortex-M7处理器,主频达300MHz。飞控旁边的STM32F303+MP6536DU组合则是部分电机驱动电路。

晓Spark上的WiFi传输方案是采用高通旗下的Atheros AR1021X,这是一颗具备USB2.0接口的2.4G/5.8GHz双频WiFi芯片,支持802.11a/b/g/n标准,MAX传输速度300Mbps。
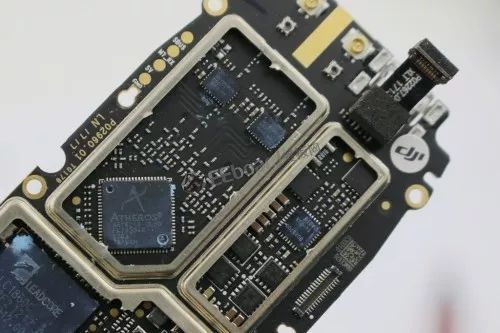
信号放大部分采用了两颗功放芯片SKY85809-11,对应两个不同频段的信号,手机控制为2.4GHz频段,Spark遥控器可以实现5.8GHz的WiFi连接,大疆官方称Spark可以实现2公里距离的高清信号图传,这点实际体验过,这种情况只能在毫无遮挡物的条件下。

晓Spark的充电管理单元使用了TI的BQ25700升压充电芯片,配合4颗MOS管,可实现通过5V的手机充电器或普通5V的USB接口充电宝,这也是晓Spark上的一大亮点,不需要取下电池就能给11.4V智能飞行电池实现充电。
小结,从晓Spark的解决方案来看,可谓是麻雀虽小五脏俱全,在和成人手掌差不多大小的情况下,晓Spark实现了诸多创新功能功能的集成,如3D传感系统、视觉定位系统等,另外,从晓Spark整体的结构和布局也能看出其出色的系统设计,堪比无人机中的教课书,相信不少用户可以从模仿中提升自我。